The primary reason that I had originally
purchased my first Raspberry
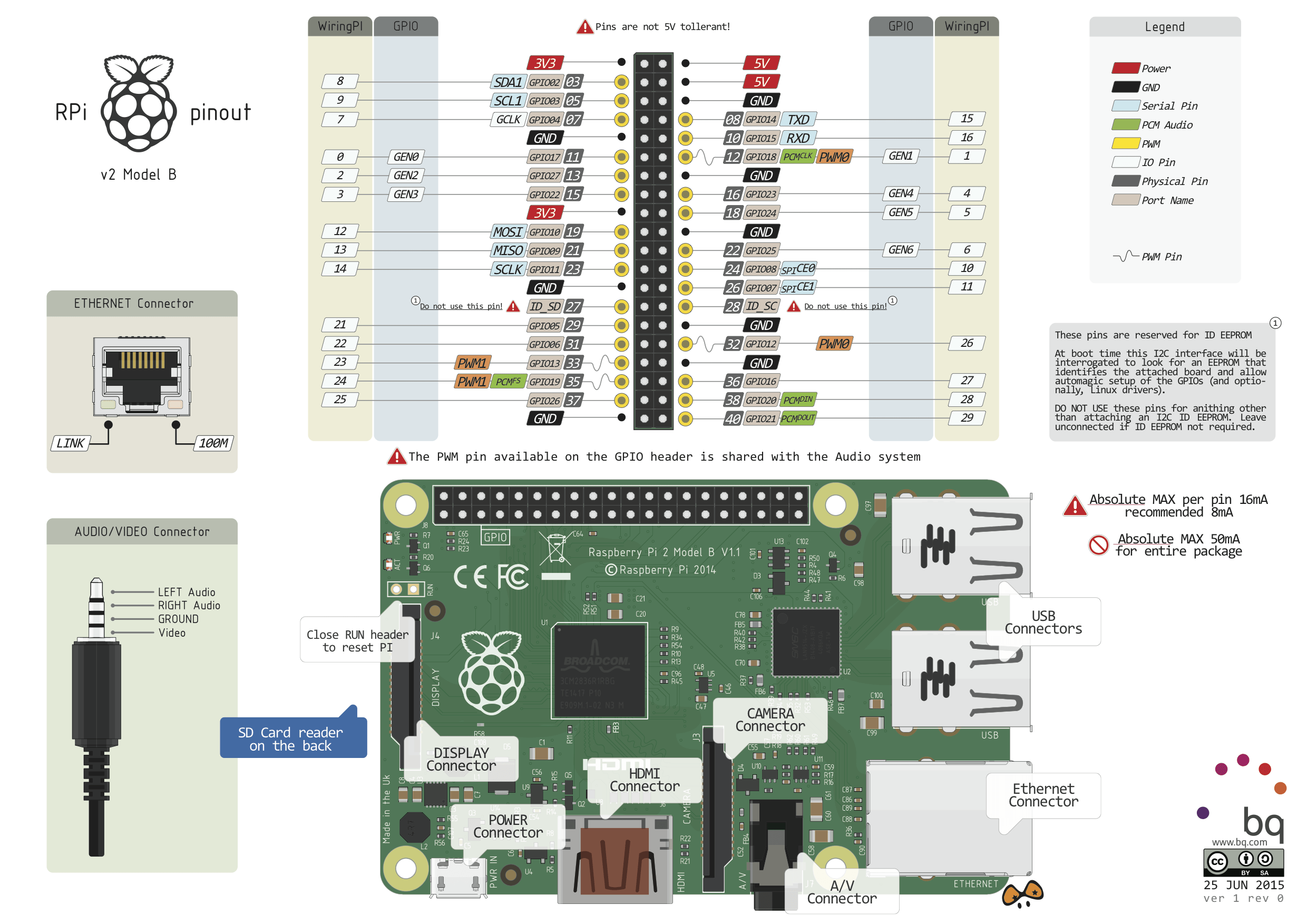
Pi 2 Model B SBC
(Single Board Computer) was to operate my Flight Tracking Station.
With the prices of GPS modules dropping to extremely
affordable levels (about
$4 CDN), I decided to swap out the U-Blox
NEO-6M GPS module for one that had a 5th pin -- a PPS
(Pulse-Per-Second) contact that I could use to
implement a high-accuracy NTP
(Network Time Protocol) stratum
1 time server! In other words, using the
primary (stratum 0) time clock sources available on GPS
satellites to make my own secondary (stratum 1) shareable
computer time source.
My primary source of information on how to do this came
from these excellent sources:
Setting
up a Stratum 1 NTP server on a Raspberry Pi
The
Raspberry Pi as a Stratum-1 NTP Server
GPSD
Time Service HOWTO
A
Guide To GPS Network Time Synchronization
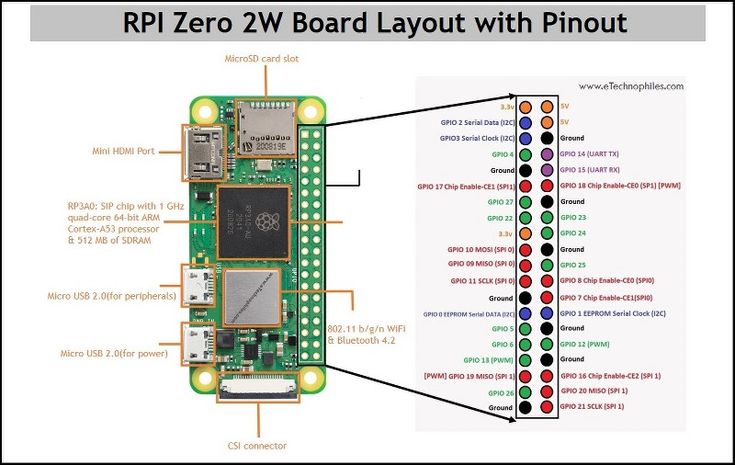
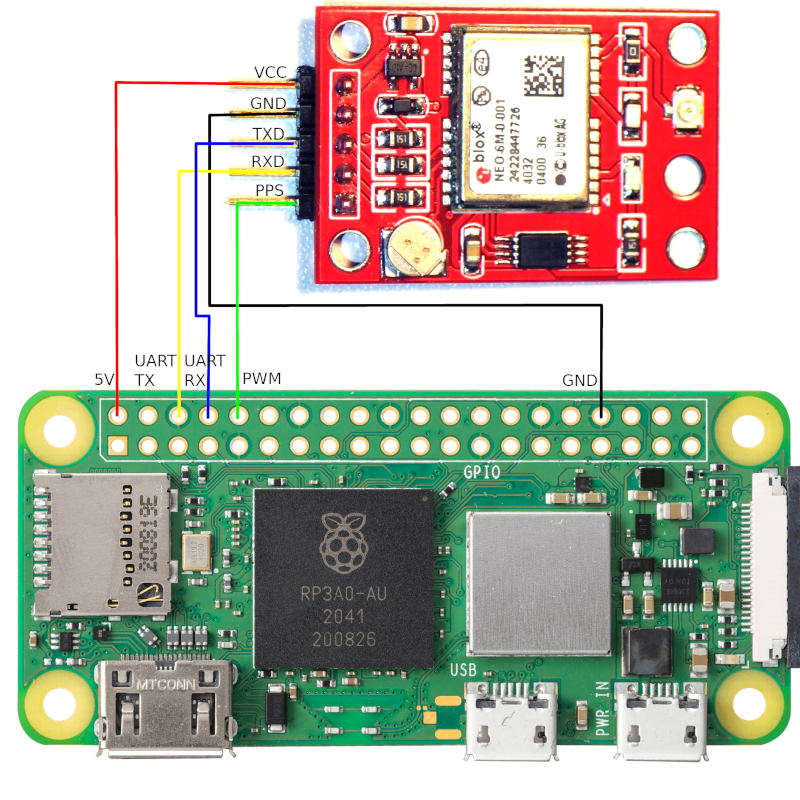
The wiring for the GPS module that I used is as follows:
NEO-6M
|
Raspberry Pi
|
VCC
|
3V3
|
GND
|
GND
|
RXD
|
TXD (GPIO14)
|
TXD
|
RXD (GPIO15)
|
PPS
|
PWM0 (GPIO18)
|
Power (VCC/3V3) and Ground (GND) pins are basic. The
Receive-Data (RXD) and Transmit-Data (TXD) are used to
receive and transmit the serial-based
GPS data stream (notice that reversal when connecting the
pins i.e. the GPS 'transmit' pin is connected to the
Raspberry Pi 'receive' pin, and vice versa). The
magic comes from the Pulse-Per-Second
(PPS)
GPS pin being connected to the Raspberry Pi Pulse-Code-Modulation
(PCM) pin (also acting as Pulse-Width-Modulation
(PWM0)).
When a good GPS satellites lock has been achieved, my GPS
will transmit useful time (as well as position) data (at
9600 baud) using various NMEA
sentence structures. The one that the NTP utility
uses to extract time are the following:
$GPRMC,POS_UTC,POS_STAT,LAT,LAT_REF,LON,LON_REF,SPD,HDG,DATE,MAG_VAR,MAG_REF*CC<cr><lf>
$GPGLL,LAT,LAT_REF,LONG,LONG_REF,POS_UTC,POS_STAT*CC<cr><lf>
$GPGGA,POS_UTC,LAT,LAT_REF,LONG,LONG_REF,FIX_MODE,SAT_USED,HDOP,ALT,ALT_UNIT,GEO,G_UNIT,D_AGE,D_REF*CC<cr><lf>
Here are some samples of those sentences from my GPS (with
position information obscured):
$GPRMC,195038.00,A,xx11.02333,N,xxx07.52859,W,0.052,,140817,,,A*61
$GPGLL,xx11.02333,N,xxx07.52866,W,195037.00,A,A*77
$GPGGA,195038.00,4911.02333,N,09807.52859,W,1,08,1.06,341.9,M,-26.1,M,,*69
Here is a sample NTP time statistics from my time server
soon after it was running:
pi@raspberrypi ~ $ ntpq -p
remote refid st t when poll reach delay offset jitter
==============================================================================
LOCAL(0) .LOCL. 10 l 45h 64 0 0.000 0.000 0.000
oGPS_NMEA(0) .GPS. 0 l 8 16 377 0.000 0.003 0.002
*192.95.27.155 200.98.196.212 2 u 37 64 377 51.341 1.001 166.392
+kirdu.smartacti 213.251.128.249 2 u 3 64 77 42.552 10.272 99.637
+host1.hosttechn 213.251.128.249 2 u 20 64 377 38.465 10.301 161.560
+zero.gotroot.ca 30.114.5.31 2 u 65 64 376 34.556 0.719 52.451
In this sample, the GPS source is providing a time
accuracy of 0.003 microseconds (3 millionths of a second)
to my computer network! This time source is good
enough to join (if I chose to do so) the list of other NTP
time sources used by millions of computers around the
world: How do I join pool.ntp.org?
UPDATE: After upgrading my Raspberry Pi linux
version to Raspbian/Debian 9 'Stretch', my GPS/PPS
functionality stopped working -- which I have now finally
fixed by doing the following -- since I found out that the
'/dev/ttyAMA0' device was being used by the 'login'
process, which was interferring with 'ntp' from getting at
it as well:
- Type: "sudo raspi-config"
- Pick: "5 Interfacing Options Configure
connections to peripheral"
- Pick: "P6 Serial Enable/Disable shell and kernel
messages on the serial connection"
- Answer 'No' for: "Would you like a login shell to be
accessible over serial?"
- Answer 'Yes' for: "Would you like the serial port
hardware to be enabled?"
- Type: "sudo reboot"
I also did the following, but was not sure whether it
was necessary or helped:
systemctl stop serial-getty@ttyAMA0.service
systemctl disable serial-getty@ttyAMA0.service
systemctl mask serial-getty@ttyAMA0.service
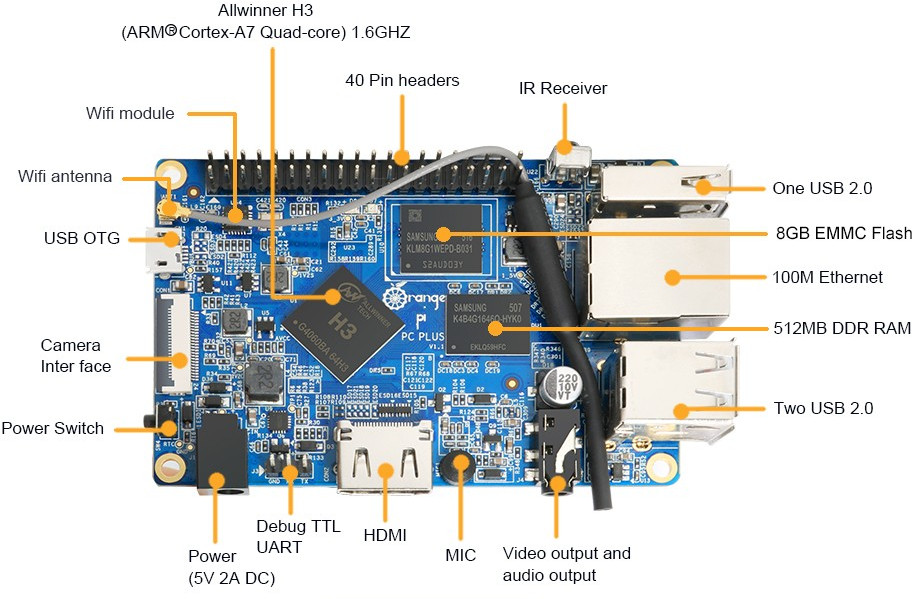
UPDATE: I also activated the same feature on my
backup server: an Orange Pi
PC Plus (info here,
purchased here
and here).
I chose this particular model since it was the best
'bang-for-the-buck' that I could find in the Orange Pi
series, was less expensive than the boards offered by the
Raspberry Pi foundation, and had an 8GB eMMC flash memory
module on it (to avoid eventual wear-out of removable SD
cards). A good resource comparing the various Orange
Pi models is here.
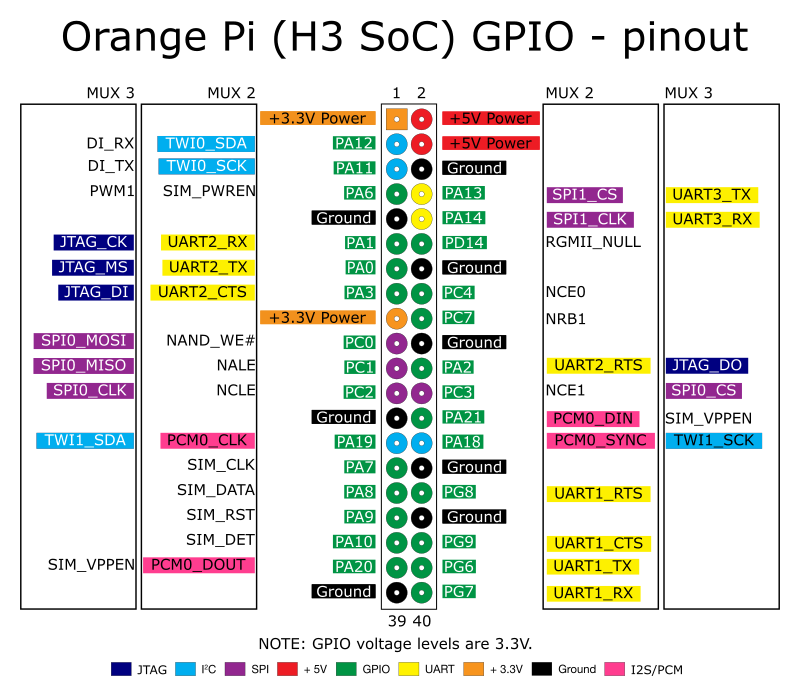
The wiring for the GPS module that I
used is as follows:
NEO-6M
|
Orange Pi
|
Pin
|
VCC
|
+3.3V
|
1
|
GND
|
GND
|
9
|
RXD
|
PA13 (UART3_TX)
|
8
|
TXD
|
PA14
(UART3_RX)
|
10
|
PPS
|
PA6 (PWM1)
|
7
|
Currently the 'best' source of Linux distros for the
Orange Pi boards comes from Armbian, rather
than from the manufacturer itself (which provides
almost no support, and with non-100%-functional
software!). A useful discussion forum for the
Allwinner H3 boards with mainline Linux kernel is here.
- For 'legacy' kernel, no PPS features are
present, so a new kernel needs to be compiled
(lots of work!):
ORANGE
PI PLUS H3 with GPS/PPS – — The Black Magic
Boxes
- For 'mainline' kernel, PPS feature is already
present, but needs to be activated:
Add to the '/boot/armbianEnv.txt'
file, specifically entries for 'overlays' to
activate 'pps-gpio' and 'uart3' (if that is the
pins you have decided to use), and
'param_pps_pin=PA6' (again, if that is the pin you
have opted to use for the PPS signal):
verbosity=1
logo=disabled
console=both
disp_mode=1920x1080p60
overlay_prefix=sun8i-h3
rootdev=UUID=7f3d2ddb-0231-45dd-857c-81bc36aba60e
rootfstype=ext4
overlays=pps-gpio uart3
param_pps_pin=PA6
usbstoragequirks=0x2537:0x1066:u,0x2537:0x1068:u
After rebooting, you should see 'pps' entries in
'dmesg':
[
8.277867] pps pps0: new PPS source pps@0.-1
[ 8.277928] pps
pps0: Registered IRQ 64 as PPS source
You should also be able to run 'ppstest' on the
new device:
darren@orangepipcplus:/boot$
sudo ppstest /dev/pps0
trying PPS source "/dev/pps0"
found PPS source "/dev/pps0"
ok, found 1 source(s), now start
fetching data...
source 0 - assert 1524664406.998850031,
sequence: 1743 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664407.998835994,
sequence: 1744 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664408.998835038,
sequence: 1745 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664409.998825706,
sequence: 1746 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664410.998834955,
sequence: 1747 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664411.998817203,
sequence: 1748 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664412.998810533,
sequence: 1749 - clear 0.000000000,
sequence: 0
source 0 - assert 1524664413.998828901,
sequence: 1750 - clear 0.000000000,
sequence: 0
...
Here is what my NTP configuration
file looks like, which also supports the running
of a parallel GPSD process:
# /etc/ntp.conf,
configuration for ntpd; see ntp.conf(5) for
help
# Local
server 127.127.1.0
fudge 127.127.1.0 stratum 10
# GPSD
server 127.127.28.0 mode 17 minpoll 4
maxpoll 4 iburst true prefer
fudge 127.127.28.0 flag1 1 refid GPS
# GPS with PPS enabled
server 127.127.22.0 mode 17 minpoll 4
maxpoll 4 iburst true prefer
fudge 127.127.22.0 flag1 1 refid PPS
#server 127.127.20.0 mode 17 minpoll 4
maxpoll 4 iburst true prefer
#fudge 127.127.20.0 flag1 1 refid GPS
# Internet time servers for sanity
server 0.pool.ntp.org iburst
prefer
server 1.pool.ntp.org iburst
server 2.pool.ntp.org iburst
server 3.pool.ntp.org iburst
# By default, exchange time with
everybody, but don't allow configuration.
restrict default kod nomodify notrap
nopeer noquery
restrict -6 default kod nomodify
notrap nopeer noquery
# Local users may interrogate the ntp
server more closely.
restrict 127.0.0.1
restrict -6 ::1
# Drift file etc.
driftfile /var/lib/ntp/ntp.drift
# stats
enable stats
statistics loopstats
#statistics loopstats peerstats
clockstats
statsdir /var/log/ntp/
#filegen peerstats file peers type day
link enable
#filegen loopstats file loops type day
link enable
filegen loopstats file loopstats type
day link enable
The default 'ntp' app from the respositories
doesn't appear to support PPS
properly (without patching), so I got and compiled
the 'NTPsec'
fork, which has the bonus of providing the 'ntpmon'
app. Some instructions for compiling NTPsec
are here,
but basically they are:
cd $HOME/Downloads
git clone --depth 1
https://gitlab.com/NTPsec/ntpsec.git
cd ntpsec
sudo ./buildprep
./waf configure
./waf build
sudo ./waf install
In order for the NTP logging to work
properly, the directory '/var/log/ntp'
needs to be created for every reboot, and with the
correct (open) permissions. Add the following
to '/etc/rc.local':
mkdir /var/log/ntp
chmod 777
/var/log/ntp
After that is set up, I start the NTP process
this way:
sudo service ntp start
For GPSD, here is what the '/etc/default/gpsd'
configuration file looks like:
# Default settings
for the gpsd init script and the hotplug
wrapper.
# Start the gpsd daemon automatically
at boot time
START_DAEMON="true"
# Use USB hotplugging to add new USB
devices automatically to the daemon
USBAUTO="true"
# Devices gpsd should collect to at
boot time.
# They need to be read/writeable,
either by user gpsd or the group dialout.
DEVICES="/dev/ttyS3"
# Other options you want to pass to
gpsd
GPSD_OPTIONS="-n -b -G "
The way to start the process is thus:
sudo service gpsd start
|